定位設備中所出現的誤差可規劃為兩類:不(可預測誤差)以及不精密(隨機誤差)。了解這些誤差的源頭以及重要性能夠協助您制定一些策略以防止與糾正誤差,同時也可使人們更加信賴系統的性能。以下為有關用于描述定位誤差的重要規格的詳情

圖1:說明度與精密度之間的差異
分辨率
分辨率指的是在可要求的范圍內對小距離改變的衡量。雖然分辨率在定位應用中是個重要特點,但卻無法衡量度或精密度,因為分辨率是個計算值。分辨率的計算是依據控制器、電機以及機械結構組件的規格,而因為Zaber™裝置使用備有微步進電機驅動器的步進電機,因此分辨率也可稱為微步尺寸。雖然分辨率并無法衡量誤差,但是若要取得準確且精密的移動則需要高分辨率。
度
在移動范圍的任何兩個點之間移動時,度規格將表明理想移動距離以及預期之內的實際移動距離之間的大偏移程度。度規格可受到幾個誤差源的影響,而移動距離越短,度則更高。
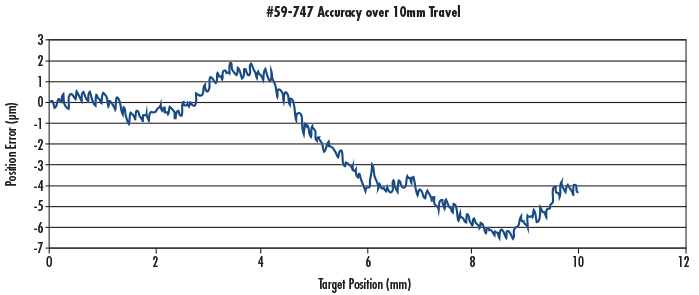
圖2:150mm Zaber™平移臺的度
可重復性
可重復性是定位裝置的精密度與一致性的佳衡量。某物件往同一方向多次接觸裝置,而裝置此后所展示的位置偏移就可確定可重復性。針對Zaber™的設備,可重復性少比度小一個數量級。
間隙
移動機械系統在移動方向中可能會留下細小缺口(或余隙)以避免過分限制的情況。在改變方向時,這些余隙將形成微小的空動(或游隙)并且需要被吸收。這也被稱為系統內所呈現的間隙。
對于許多系統,要處理此不來源并非難事。其中一個方法是對關鍵位置的接觸采取一致的方向。另一個方法是施加微弱的軸力,將調整臺推向缺口的一側。在垂直應用中,地心引力將會施加抵消間隙所需的力量。
版權所有 © 2024 江陰韻翔光電技術有限公司 備案號:蘇ICP備16003332號-1 技術支持:化工儀器網 管理登陸 GoogleSitemap


